Types of Mechanical Work
The Lever
Of the types of mechanical work, we shall be primarily concerned with the lever.
Any rigid body capable of rotation about a fixed point or axis is a lever.
The most useful form of the lever is a straight rod, in which the point or axis of rotation[1] is called the fulcrum.
The extent of the rod on either side of the fulcrum is called the lever arm.
Levers are divided into three classes.
Class 1: Fulcrum between the Force and Resistance
In this class, the force acts on one side of the fulcrum and the resistance to be overcome (or the weight) is on the other side of the fulcrum.
The crow-bar, scissors, and the see-saw are levers of the first class. A characteristic feature of this class of levers is the following:
Change in direction between the line of force-application and that of resistance motion. These motions in the straight rod lever, are opposite in direction. (See Figure 1a)
Change in direction between the line of force-application and that of resistance motion. These motions in the straight rod lever, are opposite in direction. (See Figure 1a)
1) F = Force, 2) P = Power, 3) R = Resistance
Class 2: Resistance between fulcrum and force.
In this class, the fulcrum is at one end of the rod, the weight to be moved somewhere along the rod, and the force at some point between the weight and the free end (not the fulcrum) of the rod.
The wheelbarrow and nutcracker are levers of the second class.
The resistance is moved in the same direction in which the force acts. See the figure below.
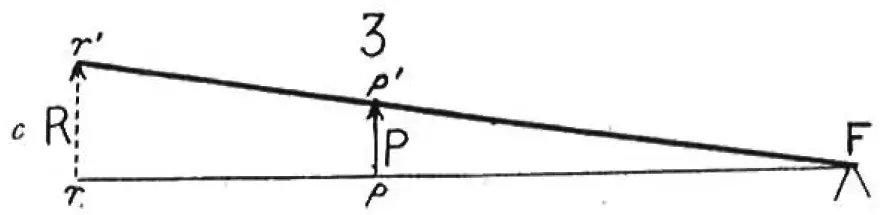
Class 3: Force between fulcrum and resistance.
Similar to class 2, except that force and resistance have changed places. The draw bridge is an example of a third class lever.
The direction of force and the movement of resistance are the same. (See Figure 1c)
Question: What is the purpose of their application?
The usefulness of the various types of lever is determined by the purpose which their application is to serve.
The work coefficient of all levers (ignoring friction) is the ratio of power-arm to resistance-arm. [2]
That is equivalent to saying that, since the work done depends upon the weight moved and the distance through which it moves.
The greater the distance, the less the weight, and conversely, the greater the weight, the less will be the distance through which a given force will move it.
Lever Classification
For class 1 levers, this principle holds in any desired degree. In Class 2, the power necessarily moves a greater distance than the resistance.
The use of a Class 2 lever results in a gain of power with a loss in speed. In Class 3, the power is always between the fulcrum and the resistance. It must move through a distance less than the R. (p'p < r'r.) As a result, we have always a gain in speed with a loss in force.
If speed in levers of the second class are desired, the necessarily wide excursion and excessive speed of the force-application would make the movement awkward. On the other hand, greater power can be secured with the third class levers by appropriately increasing the power at P, which would not interfere with the action of the movement.
1) F = Force, 2) P = Power, 3) R = Resistance
If speed in levers of the second class are desired, the necessarily wide excursion and excessive speed of the force-application would make the movement awkward. On the other hand, greater power can be secured with the third class levers by appropriately increasing the power at P, which would not interfere with the action of the movement.
[1]axis of rotation: The straight line through all fixed points of a rotating rigid body around which all other points of the body move in circles.
[2]Resistance Arm: distance between axis and point of resistance application.
Physiological Mechanics of Piano Technique