Physics Demonstration
This may be demonstrated as follows: Place the right hand upon a table and raise the elbow sufficiently to bend the hand
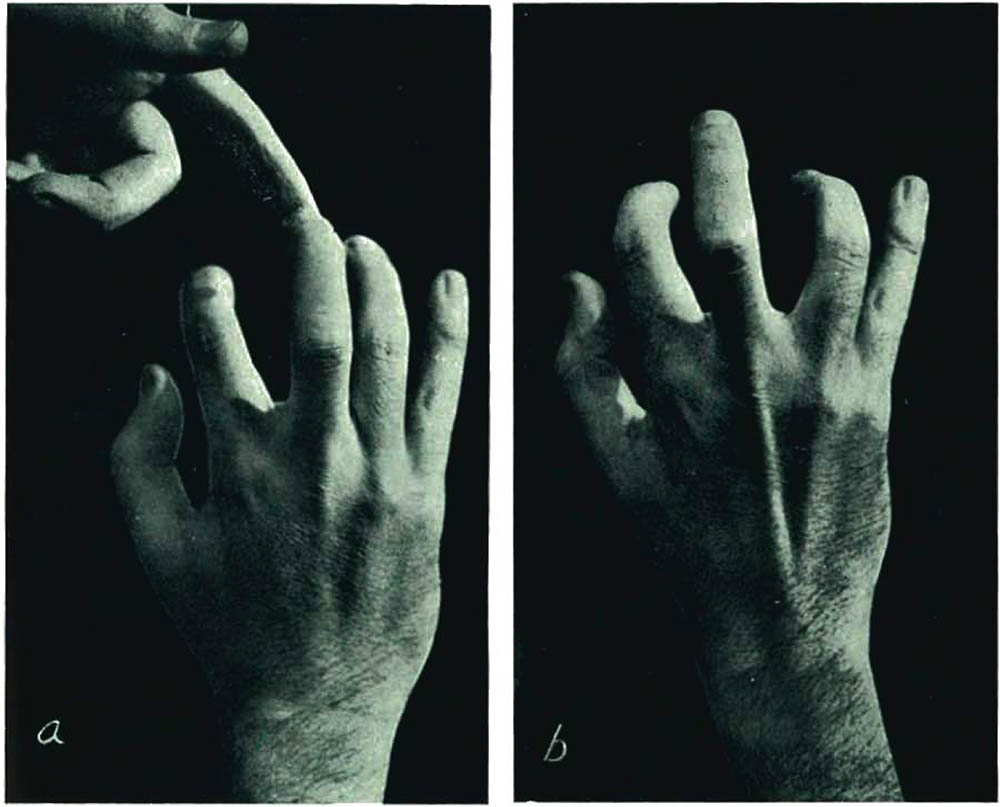
backward at the wrist about thirty degrees. Now lift the third finger. Its tendon will contract and will form an easily visible
ridge along the back of the hand. (See Figure 31, showing this ridge.) Place the forefinger of the left hand firmly upon this about an inch in front of the wrist. Now let the lifted finger descend slowly and the tendon will relax.
When the finger-tip reaches the table, continue to press firmly against the table with the tip of the third finger.
The tendon may then be pushed to either side. Now release the pressure upon the table, at which point the tendon can be felt to
"slide" back into a straight -line position, and not until this "state is achieved" does finger-lift begin.
If before this point has been reached, the pressure upon the tendon has been maintained at an angle, the tendon will be felt to slide along under the finger-tip, from the side, until its straight-line position has been reached. With the finger lifted, though not moving, it is not possible to push the tendon to either side appreciably. This is the looseness or "slack" to which I have referred. The greater the pressure against the fixed obstacle, the greater is this looseness.
If before this point has been reached, the pressure upon the tendon has been maintained at an angle, the tendon will be felt to slide along under the finger-tip, from the side, until its straight-line position has been reached. With the finger lifted, though not moving, it is not possible to push the tendon to either side appreciably. This is the looseness or "slack" to which I have referred. The greater the pressure against the fixed obstacle, the greater is this looseness.
Similar Test
A similar test can be made with the tendon of the elbow flexor.
With the forearm resting horizontally upon a table in the supinated position (palm of the hand up), and a considerable weight in the hand so as to emphasize the contraction of the muscles, raise the hand.
The tendon of the biceps muscle (which is a flexor of the elbow in the supinated position) will be seen to rise in the bend of
the elbow.
Take this tendon between the fingers and thumb of the left hand, and push it toward one side, not too strongly.
So long as the weight is held in the lifted hand, the contraction of the tendon will not permit its position to be changed easily.
Now let the hand return to the table, and rest as before.
The tendon will be felt to relax, and when the arm is resting firmly upon the table, may readily be pushed aside.
Once again prepare to lift the weight very slowly from the table by elbow flexion. The flexor-tendon will be felt to contract before the forearm begins to move. Let us say the forearm weighs approximately two pounds. A contraction sufficient to move one pound will, therefore, not move the forearm. As a matter of fact, the moment contraction begins work is being done, but there is not a sufficient quantity of work to produce the desired effect.
Once again prepare to lift the weight very slowly from the table by elbow flexion. The flexor-tendon will be felt to contract before the forearm begins to move. Let us say the forearm weighs approximately two pounds. A contraction sufficient to move one pound will, therefore, not move the forearm. As a matter of fact, the moment contraction begins work is being done, but there is not a sufficient quantity of work to produce the desired effect.
The concept of work in physics is a measure of energy transfer that occurs when an object is moved over a distance by an external force at least part of which is applied in the direction of the displacement.
This may be seen by resting the forearm, volar[1] side up, upon an appropriate balance. Then, just as soon as contraction of the tendon occurs, the balance will register a withdrawal of weight. The arm cannot leave the surface of the balance until the latter registers zero, then the arm-lift, unsupported, begins. In the case of the balance as a rest, we cannot properly speak of looseness, because the resting surface actually ascends with the arm from the very beginning of weight-withdrawal. In the case of a firm rest, however, we have the condition of muscular contraction and no movement, which is characteristic of incoordination since it produces slack.
This may be seen by resting the forearm, volar[1] side up, upon an appropriate balance. Then, just as soon as contraction of the tendon occurs, the balance will register a withdrawal of weight. The arm cannot leave the surface of the balance until the latter registers zero, then the arm-lift, unsupported, begins. In the case of the balance as a rest, we cannot properly speak of looseness, because the resting surface actually ascends with the arm from the very beginning of weight-withdrawal. In the case of a firm rest, however, we have the condition of muscular contraction and no movement, which is characteristic of incoordination since it produces slack.
Since coordination requires the muscular response doing a required amount of work in a given time with least waste of energy, the state of contraction of a muscle is independent of the mere position of the skeletal parts it moves.
If the forearm be lifted with the hand carrying an additional weight, a greater muscular contraction will obviously be necessary to bring the hand into a desired position, than would be required to bring it into the same position without the weight. Both movements may be equally well coordinated, in spite of the possibly marked difference in muscular response. Here neither the range, nor speed determines the muscular reaction, which is the result of the resistance to be overcome.
Coordinated Movement
Moreover, the definition of coordination as a minimal expenditure of energy for a desired outcome, determines also the range at which the movements will occur. In the study of the anatomical structure the increase of physiological resistance as the extremes of the range are approached was pointed out .
To overcome this added resistance will require additional energy, which, since it serves merely to overcome excessive resistance, is itself wasted work.
Additional Meaning of Coordinated Movement
Consequently, a coordinated movement is a movement which permits the joints involved to act as near to their mid-range of action as possible. By keeping my forearm stationary, I can, with fully extended third finger, by abducting and adducting the hand at the wrist
move my finger-tip through eleven inches.
But the movement, through at least two inches at each end, is awkward.
I can move the finger through the same distance much more readily by adding upper-arm abduction or humerus rotation, or a little of each. You have to figure out which combination of components are optimal for you.
In coordinated movements the avoidance of the extremes of range is responsible for the shift of muscular action as the movement continues. It also explains why, in practically all pianistic movements, motion at more than one joint takes place.
[1]volar: Pertaining to the palm or the sole. For example, the volar surface of the forearm is the portion of the forearm that is on the same side as the palm of the hand.